

激光多普勒原理
激光多普勒原理
激光多普勒原理
LaserSpeed 采用激光双光路干涉技术测量物体的速度,通过对速度进行时间积分得到长度。
干涉条纹间距 d 与激光波长和两光束间 K 的关系如下:
d = λ / 2sinK
物体速度 v 与间距 d 和通过该间距的时间 t 的关系如下:
v = d / t
周期与频率的关系如下:
t = 1 / f
速度对时间的积分得到长度。
L= ∫0T vdt
LaserSpeed 原理
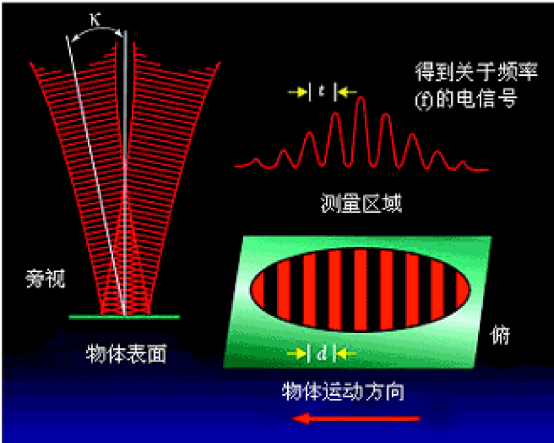
LaserSpeed系统是一种基于双光束激光多普勒理论的测速系统。两条同源激光相交时,会产生干涉条纹区域,这个条纹区域称测量区域,可以见到显著的干涉条纹。干涉条纹间距 ( d )可以由激光光波波长 ( λ ) 和两条光束的半角 ( K ) 得到。公式如下:
d = λ / 2sinK
当光线照射到物体表面时,物体表面的微小颗粒结构将对光线产生散射。当物体表面的微小颗粒通过测量区域时,对应亮光纹时,颗粒将散射一个信号;颗粒的散射信号将消失。这个散射的信号可以被系统光子探测器检测到,并且转换为频率信号(f),该频率与物体的运动速度有关。
物体运动速度( v )可以由颗粒通过一个条纹间间距与( d )和通过该间距的时间( t )得到,公式如下:
v = d / t
由于时间 t 是频率的倒数,由此,颗粒的运动时间可以由以下公式得到:
t = 1 / f
由此, v=d x f
得到物体的运动速度后,物体的长度则可以由速度对时间的积分得到:
L= ∫0T vdt